当前,具身智能的发展高度依赖动作捕捉技术提供的人类行为数据。4月29日,中关村Xᴬᴵ智汇讲坛系列之前沿沙龙邀请到刘昊扬教授围绕运动感知技术的核心发展与应用场景展开分享,重点探讨了该技术在数字媒体、智慧医疗及具身智能三大前沿领域的创新实践。作为动作捕捉与虚拟现实领域的专家,他结合诺亦腾科技的技术成果,解析高精度运动捕捉如何驱动虚拟与现实交互、赋能智慧医疗、并推动具身智能的发展。
技术溯源:从传统到创新的动捕技术进化
讲座伊始,刘教授以专业视角系统梳理并对比了机械式、光学式与惯性传感器三类动作捕捉技术的发展脉络与技术特性。通过深入剖析,他着重指出惯性传感器技术凭借其无线化、便携性等显著优势,成功突破传统空间约束,实现了"穿戴即用、数据实时采集"的技术革新,在动态捕捉领域展现出独特的应用价值。

场景赋能:惯性传感器动捕技术的应用实践
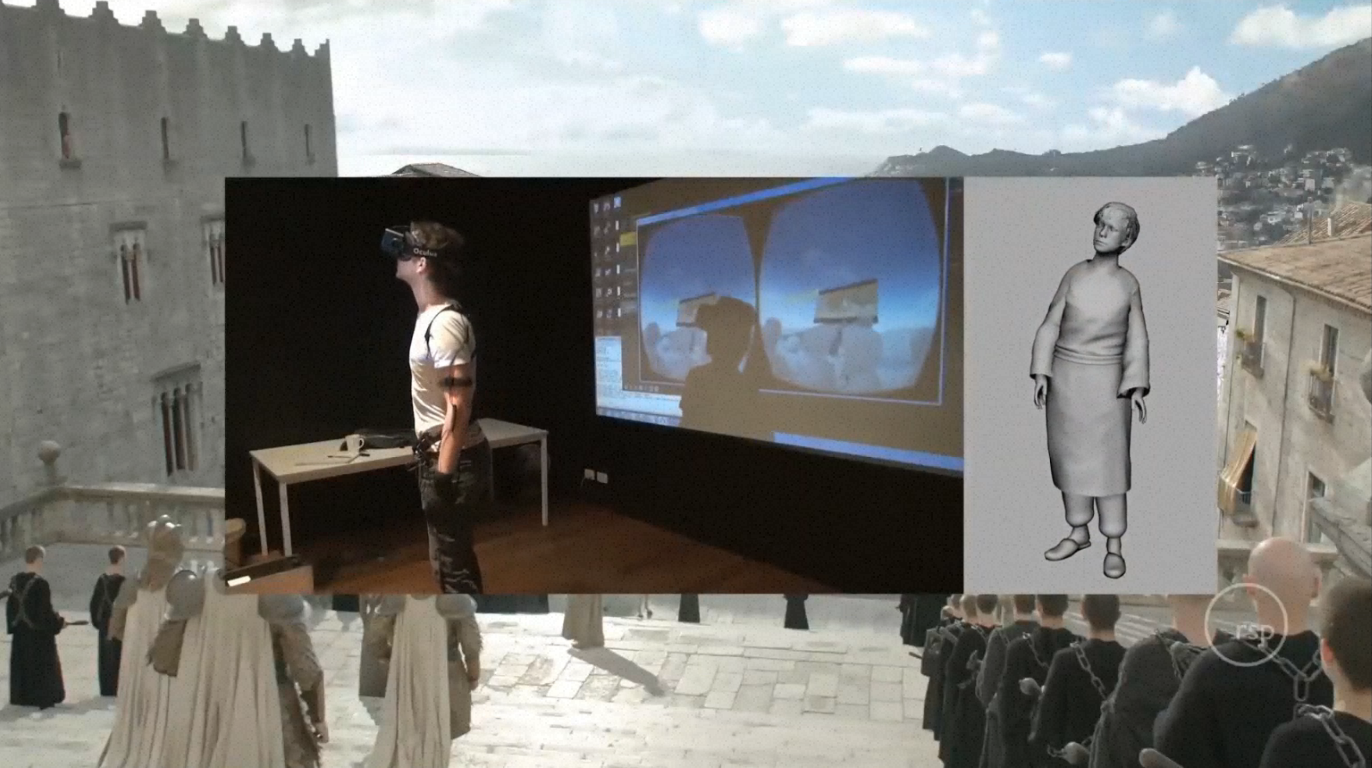
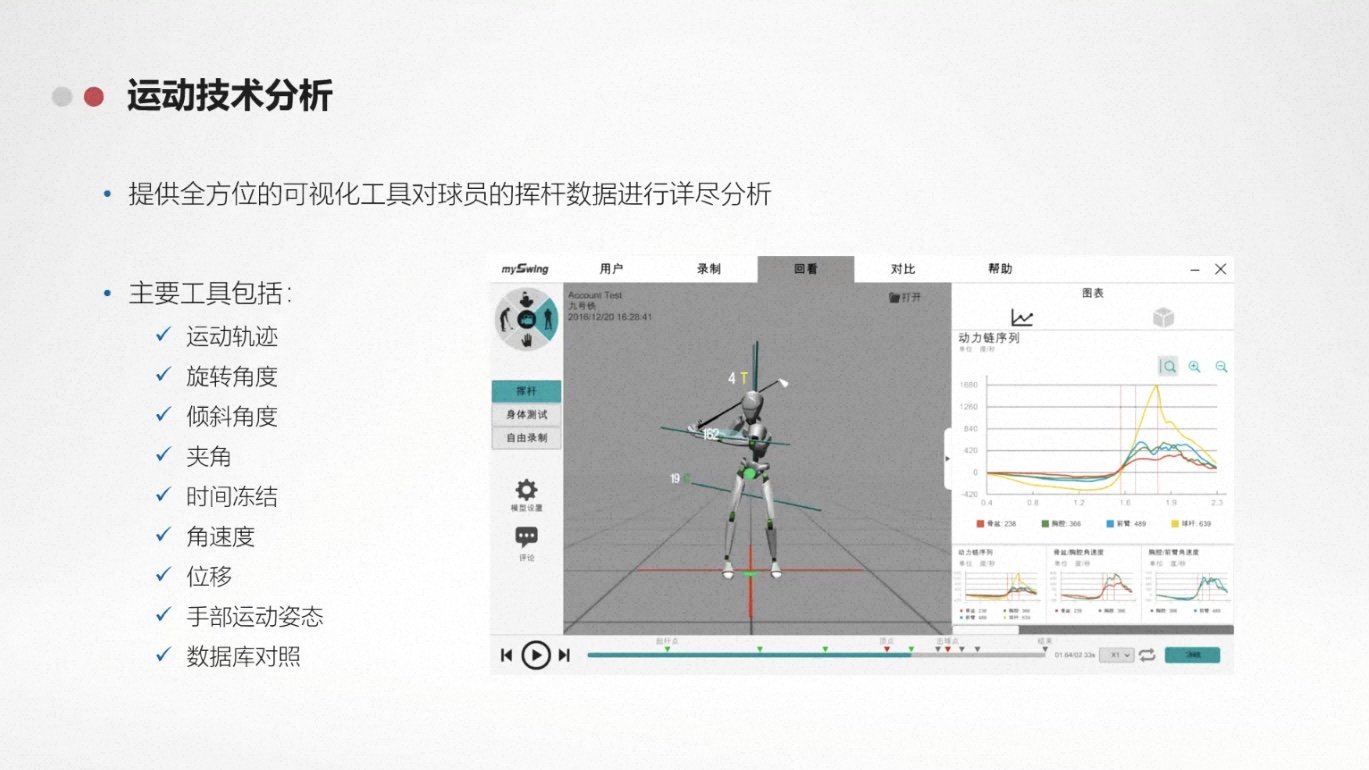
惯性动捕技术在多领域展现强大适应性:数字媒体中,《权力的游戏》借该技术在真实悬崖场景采集演员动作驱动虚拟角色,突破光学动捕的遮挡限制;《星际迷航》等影片实现细腻动作还原,推动特效进入“实景交互”时代。体育领域,动捕技术成为精准训练核心:赛艇训练中传感器实时采集桨频、身体姿态等数据,助力教练远程科学指导;击剑运动员通过360度动作回放修正出剑角度;高尔夫训练中18个传感器构建三维模型,将复杂挥杆指标转化为可视化图表,实现“数据化教学”。在虚实融合场景,技术从工业仿真延伸至消费级体验:为载人深潜器开发的VR系统模拟舱内操作,优化人机协同;平昌冬奥会上展示的反重力项目让参与者体验“月球行走”;大众途锐VR赛车实现1:1场景映射,同步真实驾驶体感,打造沉浸式交互。医疗领域,针对高风险的骨盆微创手术,惯性动捕技术结合术前CT建模与术中实时追踪,使医生无需反复X光透视,通过屏幕清晰把控钢钉路径,大幅降低医患辐射风险,标志着从辅助感知到精准操控的突破。
具身智能展望:机器人学习的人类动作解码
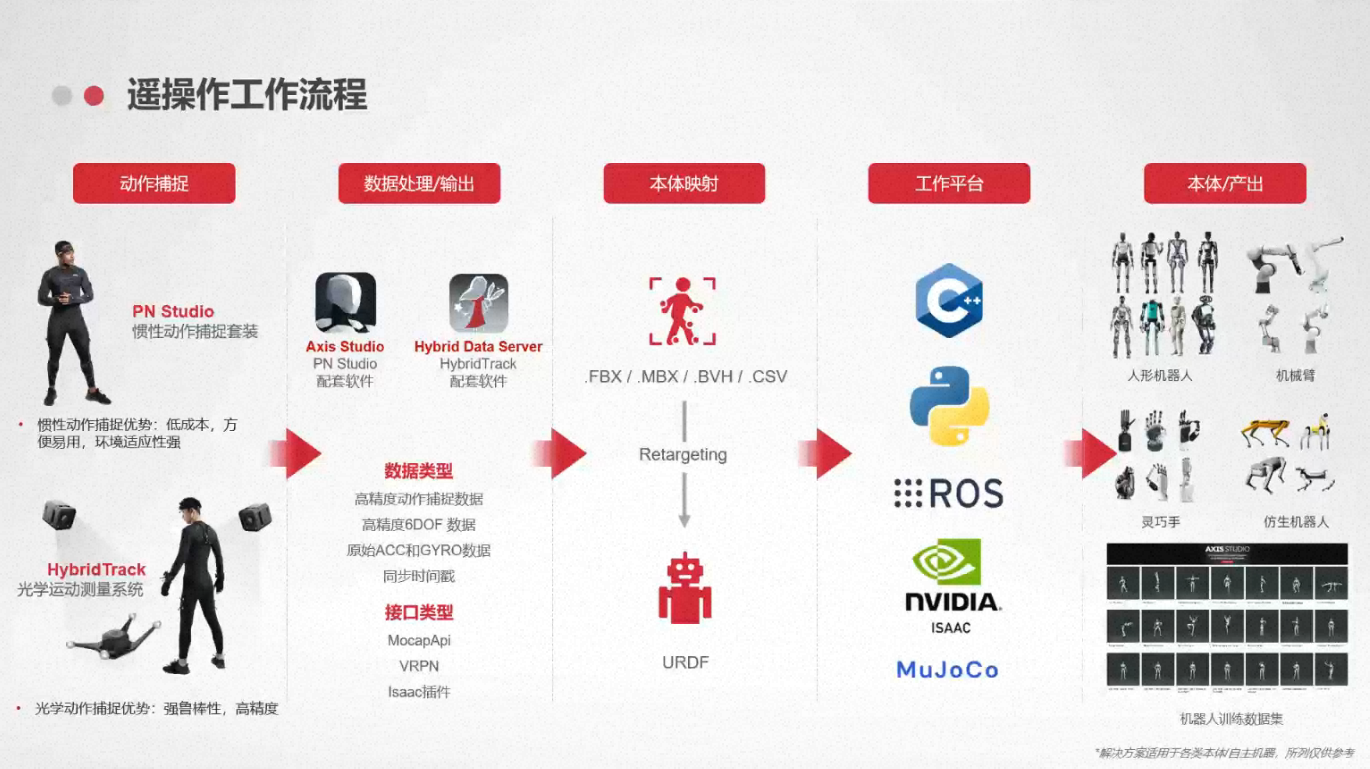
面对具身智能的发展,刘教授指出跨本体动作映射是核心挑战——人类与机器人关节构型不同,需通过惯性与光学融合的动捕系统,采集人类操作工具的高自由度动作,再通过“映射”(targeting)技术转化为机器人可执行的指令。当前数据采集主要依赖“人穿动捕设备遥控机器人”,如特斯拉自动驾驶通过大量人类驾驶数据训练模型,使车辆学会复杂路况处理,尽管存在“跨设备数据通用性”难题,但该技术为未来机器人自主学习提供了基础数据支撑。
未来展望:技术与需求的深度融合之路
讲座最后,刘教授以《数字化生存》一书为例,强调技术发展需紧扣应用需求。未来,运动感知技术的价值在于“基础研究与场景落地的深度融合”,既要突破传感器精度、数据建模等技术瓶颈,更要理解行业真实需求,让科技真正服务于人。此次讲座不仅展现了运动感知技术的多元应用图景,更引发了对“技术如何赋能产业、服务民生”的深层思考,北京中关村学院和中关村人工智能研究院将继续搭建学术与产业交流平台,推动前沿技术与实际需求的碰撞融合,助力更多创新成果落地生根。
中关村Xᴬᴵ智汇讲坛:前沿沙龙
中关村Xᴬᴵ智汇讲坛系列之前沿沙龙是面向垂直领域技术攻坚者的能力提升平台,由细分领域技术带头人领衔,聚焦AI相关技术最新突破,通过技术细节讲解与应用案例拆解,深度解析AI与相关领域的融合。前沿沙龙以“极基础,极应用”为理念指引,助力参与者专业能力进阶,践行中关村两院在技术攻坚、人才培育与产业赋能上的追求,为人工智能领域深度发展与创新人才培养持续注入动能。
